Role
Spatial Computing Researcher
Tools
Unity3D, OpenCV, Azure Kinect
Focus
VR/AR, Human-Computer Interaction
Duration
May - Aug 2023
Results
<100ms Latency
CyLab
@ Carnegie Mellon University
Probably my most favorite and also the most complex project I've worked on.
Depth Cameras, Point Clouds, Human Pose Detection, 3D modeling, and Virtual Reality Interface Design. All of that in one project.
I would regard this as "the complete package" project experience, majorly the reason being the perfect balance and blend of the developer role and the design work.
Long story short
If I were to put it in a nutshell, my journey and the work I performed in this project, this would be it.
Understanding the workspace
The entire enviroment being so alien to me, adapting to the ambience of cameras and sensors was the first step.
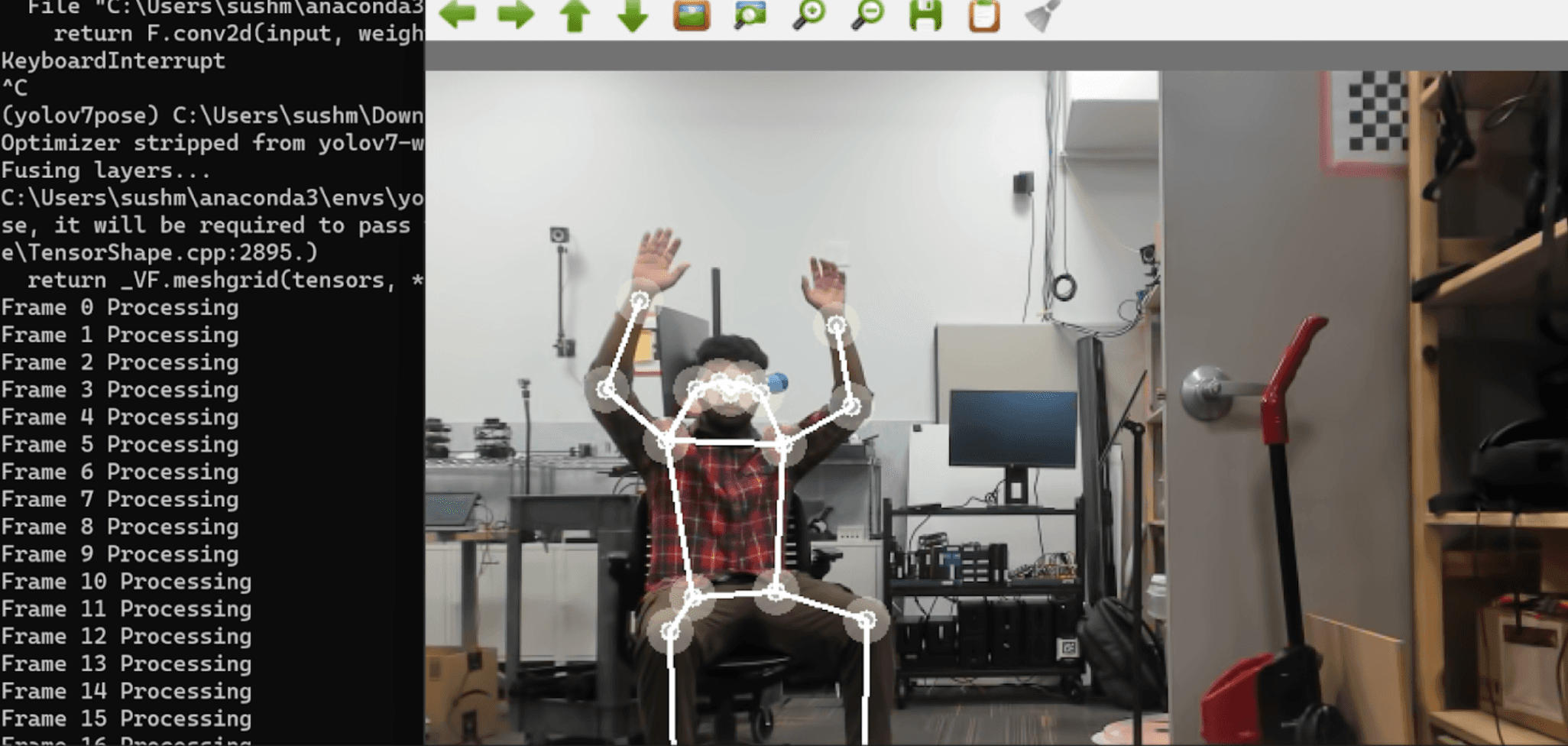
Human Pose Estimation
Developing and testing several pose detection and tracking models for real time human pose estimation was the next block in the pipeline.

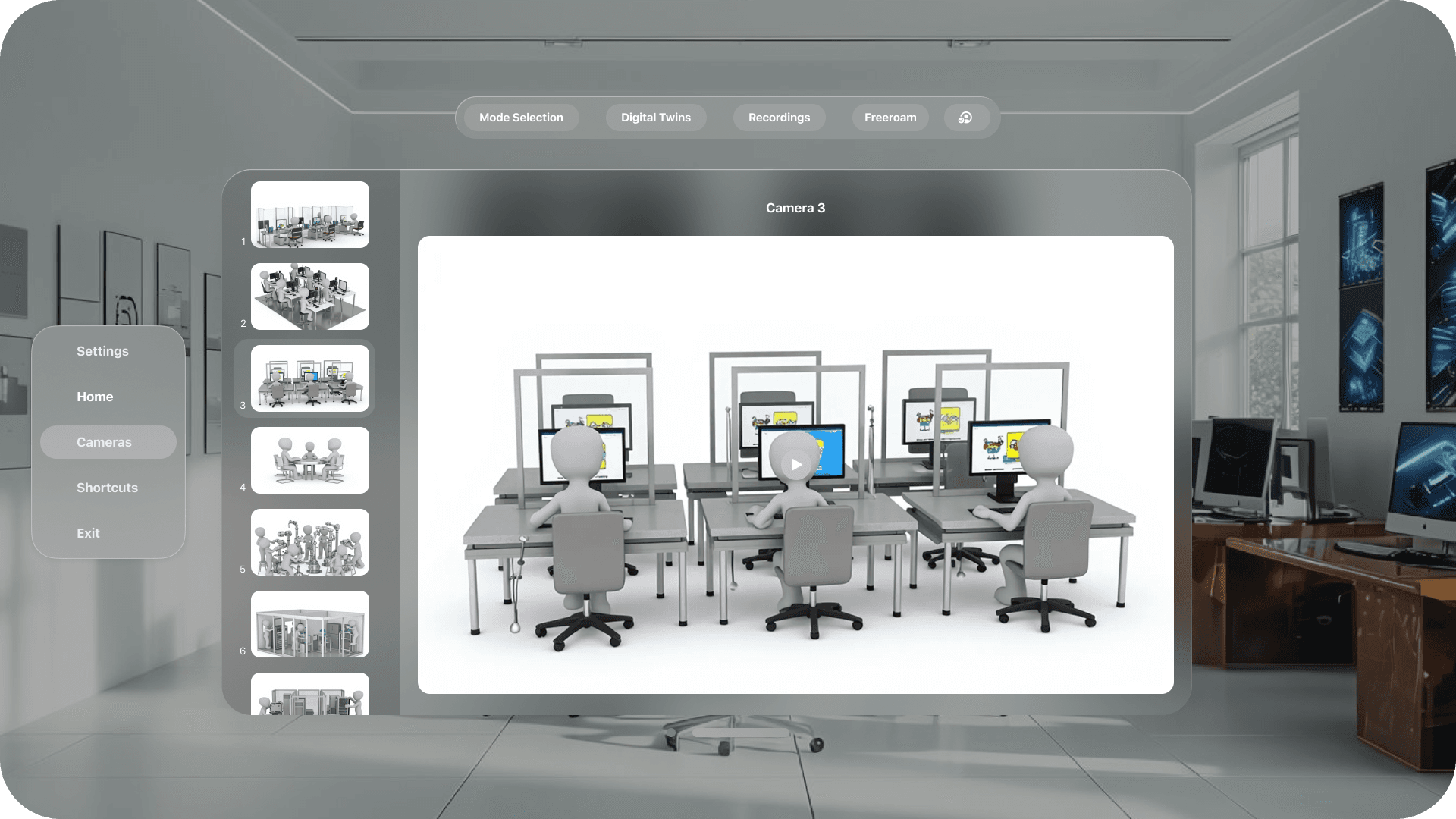
VR/AR Interface Design
I was so glad I could reach this point in the project roadmap. Designing the most user friendly interface was the final step.
Prototyping and Validation
Nothing is complete until it is well tested and used. The design had to go through numerous iterations before the final draft could make the cut.